码垛自动化机器人存在的问题与解决对策
码垛机器人对于现代工业的重要作用,码垛机器人不仅性价比高,还以较高的工作效率将人从繁重、单一的堆垛劳作中解放出来,为企业提高生产效率,降低生产成本,缩短生产周期,深受企业青睐。
那么码垛机器人在应用中存在的问题有哪些?解决对策又是什么呢?我们一起来看看吧。
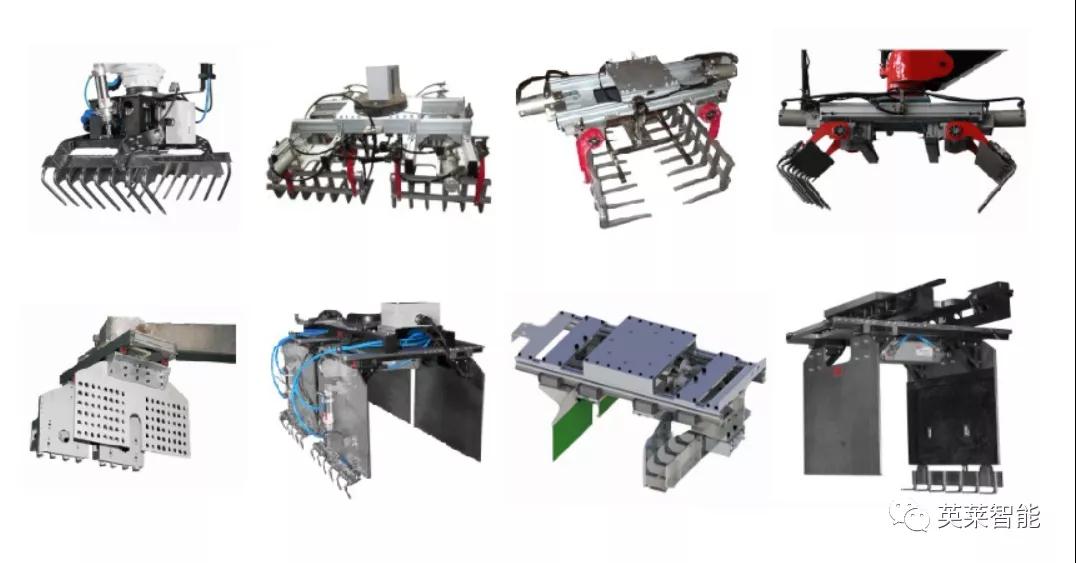
1.码垛抓手问题
码垛机器人是否能在不同的作业任务情况下完成工作,主要取决于机器人法兰盘抓手的设计。传统机器人抓手由纯机械部件组成,结构复杂笨重,不具备自动检测、控制位置能力,受工作环境温度和工件重量影响会产生运动不到位等问题,而且针对不同的物品设计特定的抓手工业机器人才可以作业。
但是,实际的工业生产中,同一工位上,可能会出现不止一种的产品规格,这种情况下机器人只能特定地抓取,无法满足品种多样化地抓取。由此可见,机器人抓手的选择和设计显得格外重要。
2.自动识别抓取问题
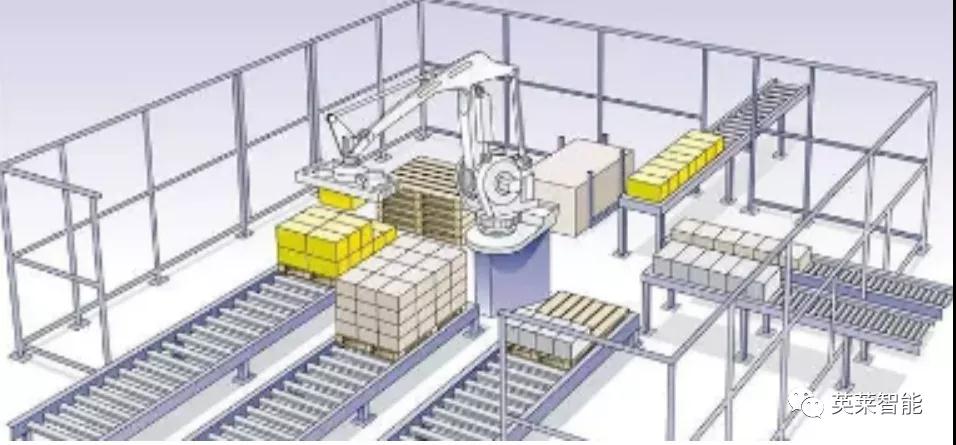
码垛机器人工作过程中,流水线上的物品需要搬运到不同的托盘上。物品在传输过程中待抓取位置可能不固定,这就需要机器人能够自主识别物品抓取点的位置。因此,智能化的识别抓取对码垛机器人的应用十分重要。
3.运动路径规划
码垛机器人码垛速率,决定了整个产线的产能。影响机器人码垛效率的因素有很多,负载强度、机器人的机械结构、码垛垛型,码垛摆放的顺序等,如果是搬运到同一终点,机器人路径选取不同,速度差也很大。所以机器人运动路径和码放垛型顺序的设计对机器人工作效率的提升起到关键作用。
解决对策
1.自适应抓手
自适应抓手自动控制器的中央处理器内预置工作程序,可与码垛机器人的主控制器建立通信,当码垛机器人开始执行抓取命令后,抓手夹取过程受负反馈作用,当检测抓手压力变化时,自动调节电机扭矩已达到抓取力度和行程的控制。
如此一来,对于不同规格的物品,一种夹爪就可以满足抓取任务,减少了频繁更换夹具的流程,提高了码垛工作的效率。
2.机械视觉系统
机械视觉系统可对物品的图片拍摄,数据采集,并通过交换机传输至工业计算机,工业计算机对采集到的物品图片进行图像处理和准确定位后,通过交换机向机器人控制系统发送控制信号,进而引导码垛机器人进行工作。
英莱基于自身的视觉技术自主研发的3D视觉智能识别系统,实时高精度数据采集,解决了产品位置不统一的码垛问题,极大的提高了工作效率,让码垛机器人更加智能化、人性化。
3.垛型设计和运动路径优化
要想提高码垛机器人的工作效率,必须对垛型和运动路径进行合理的设计。通过路径规划和轨迹规划寻找到机器人沿该路径运行的较小时间,在结合实际确定合理的路径方案;
对于码垛的摆放顺序,根据摆放的方向、层数、每层个数的需要、以由远到近、相邻摆放的原则设计摆放顺序可以缩短路径的总和,已达到提高码垛效率的目的。
英莱专业的设计和安调团队,平均从业年龄8年以上,凭借自主研发的英莱智能拆、码垛软件系统以及丰富的项目经验和对码垛垛型、码垛顺序、码垛路径做出优化的方案,提高码垛速率,进而提升产线产能。
目前码垛机器人在不停的进行技术升级,通过借助传感器技术使它们变得更智能、更安全,从而激发出更大的价值和更多潜能。英莱以客户为中心,以技术为核心,致力于为客户提供具价值的工业智能化解决方案,助力企业实现智能化、自动化、生态友好化的生产模式!