
工业机器人被誉为“制造业皇冠顶端的明珠”,是衡量一个国家创新能力和产业竞争力的重要标志,已经成为全球新一轮科技和产业革命的重要切入点。
根据国际机器人联合会(IFR)官方报告显示,2020年至2022年,工业机器人的出货量将实现两位数的增长——平均每年增长12%,预计2022年将达到58.4万台。

今天,让我们一起聊一聊被誉为“制造业皇冠顶端的明珠”的工业机器人的前世今生。
“工业机器人”的提出者名为:约翰戴沃尔,在 1954 年他申请了“工业机器人”这一概念的专利。
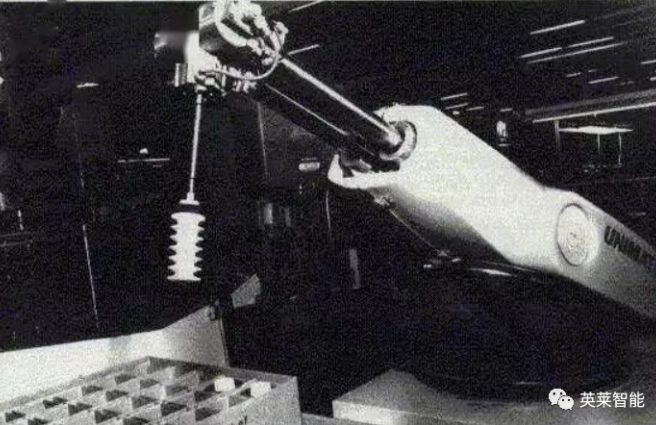
1956 年,约翰戴沃尔和约瑟夫恩盖尔柏格基于戴沃尔的专利,合作建立了 Unimation 公司;到了 1959 年 Unimation 公司的第一台工业机器人在美国诞生,开创了机器人发展的新纪元。

工业机器人是一种自动的、位置可控的,具有编程能力的多功能机械手,这种机械手具有多轴,能够借助于可编程序操作来处理各种材料、零件、工具和专用装置,以执行各种任务。
——国际标准化组织 / ISO
▌可编辑
工业机器人可随其工作环境变化的需要而再编程。因此,它在小批量、多品种的柔性化制造过程中,能发挥均衡、高效率的功用(价值),是柔性制造系统中的一个重要组成部分。
▌拟人化

工业机器人在机械结构上有类似人的行走、腰转等动作,以及大臂、小臂、抓手等部位,在控制上有电脑。此外,智能化工业机器人还有许多类似人类的“生物传感器”,如接触传感器、力传感器、视觉传感器、负载传感器、声觉传感器、语言功能等。传感器提高了工业机器人对周围环境的自适应能力。
▌通用性
除了专门设计的专用工业机器人,一般工业机器人在执行不同的工作任务时,具有良好的通用性。比如,更换工业机器人手部末端操作器,便可执行不同的作业任务。
工业机器人按结构分类可分为并联结构、串联结构、混联结构三种。
● 串联结构

串联机器人出现时间早,研究得较为成熟,具有结构简单、成本低、控制简单、运动空间大等优点,在工业生产中得到了广泛的应用,是工业机器人的主要形式,其中串联结构机器人包括直角坐标型、圆柱坐标型、球面坐标型、垂直关节型、水平关节型五种类型。
● 并联结构

并联机器人的研究与串联机器人相比起步较晚,但由于并联机器人具有刚度大、承载能力强、精度高、末端件惯性小等优点,在高速、大承载能力的场合与串联机器人相比具有明显优势。
● 混联结构
混联机器人作为一种新兴结构,是以并联机构为基础,在并联机构中嵌入具有多个自由度的串联机构,构成了一个复杂的混联系统,结构设计复杂,属于对并联机的补偿和优化。
● 在码垛方面的应用
(工业机器人在英莱智能拆码垛系统中的应用)
人工码垛工作强度大,耗费人力,工作效率低。搬运机器人能够根据搬运物件的特点,在保持其形状的和物件的性质不变的基础上,进行高效的分类搬运。在生产线拆码垛、上下料、集装箱的搬运等方面发挥及其重要的作用。
● 在焊接方面的应用

(工业机器人配英莱激光视觉焊缝跟踪系统的应用)
焊接机器人主要承担焊接工作,不同的工业类型有着不同的工业需求,所以常见的焊接机器人有点焊机器人、弧焊机器人、激光焊机器人等。如今配套英莱激光视觉焊缝跟踪系统,焊接机器人已具备柔性化焊接的能力。
● 在检测方面的应用

(工业机器人配英莱视觉系统应用)
机器人具有多维度的附加功能。它能够代替工作人员在特殊岗位上的工作,比如在高危领域如核污染区域、有毒区域、核污染区域、高危未知区域进行探测。还有人类无法具体到达的地方,如病人患病部位的探测、工业瑕疵的探测等。
● 在装配方面的应用
在工业生产中,零件的装配是一件工程量极大的工作,需要大量的劳动力,曾经的人力装配因为出错率高,效率低而逐渐被工业机器人代替。装配机器人的最大特点,就是安装精度高、灵活性大、耐用程度高。
未来,工业机器人将会承担越来越多的工作,智能化和自动化的趋势,将导致工业机器人改变以往的生产经营模式,通过引进工业机器人实现生产自动化,进一步提升工业生产效率,促进产业结构的智能化调整。
以客户为中心 以技术为核心
工业机器人被誉为“制造业皇冠顶端的明珠”,是衡量一个国家创新能力和产业竞争力的重要标志,已经成为全球新一轮科技和产业革命的重要切入点。
根据国际机器人联合会(IFR)官方报告显示,2020年至2022年,工业机器人的出货量将实现两位数的增长——平均每年增长12%,预计2022年将达到58.4万台。
今天,让我们一起聊一聊被誉为“制造业皇冠顶端的明珠”的工业机器人的前世今生。
“工业机器人”的提出者名为:约翰戴沃尔,在 1954 年他申请了“工业机器人”这一概念的专利。
1956 年,约翰戴沃尔和约瑟夫恩盖尔柏格基于戴沃尔的专利,合作建立了 Unimation 公司;到了 1959 年 Unimation 公司的第一台工业机器人在美国诞生,开创了机器人发展的新纪元。
工业机器人是一种自动的、位置可控的,具有编程能力的多功能机械手,这种机械手具有多轴,能够借助于可编程序操作来处理各种材料、零件、工具和专用装置,以执行各种任务。
——国际标准化组织 / ISO
▌可编辑
工业机器人可随其工作环境变化的需要而再编程。因此,它在小批量、多品种的柔性化制造过程中,能发挥均衡、高效率的功用(价值),是柔性制造系统中的一个重要组成部分。
▌拟人化
工业机器人在机械结构上有类似人的行走、腰转等动作,以及大臂、小臂、抓手等部位,在控制上有电脑。此外,智能化工业机器人还有许多类似人类的“生物传感器”,如接触传感器、力传感器、视觉传感器、负载传感器、声觉传感器、语言功能等。传感器提高了工业机器人对周围环境的自适应能力。
▌通用性
除了专门设计的专用工业机器人,一般工业机器人在执行不同的工作任务时,具有良好的通用性。比如,更换工业机器人手部末端操作器,便可执行不同的作业任务。
工业机器人按结构分类可分为并联结构、串联结构、混联结构三种。
● 串联结构
串联机器人出现时间早,研究得较为成熟,具有结构简单、成本低、控制简单、运动空间大等优点,在工业生产中得到了广泛的应用,是工业机器人的主要形式,其中串联结构机器人包括直角坐标型、圆柱坐标型、球面坐标型、垂直关节型、水平关节型五种类型。
● 并联结构
并联机器人的研究与串联机器人相比起步较晚,但由于并联机器人具有刚度大、承载能力强、精度高、末端件惯性小等优点,在高速、大承载能力的场合与串联机器人相比具有明显优势。
● 混联结构
混联机器人作为一种新兴结构,是以并联机构为基础,在并联机构中嵌入具有多个自由度的串联机构,构成了一个复杂的混联系统,结构设计复杂,属于对并联机的补偿和优化。
● 在码垛方面的应用
(工业机器人在英莱智能拆码垛系统中的应用)
人工码垛工作强度大,耗费人力,工作效率低。搬运机器人能够根据搬运物件的特点,在保持其形状的和物件的性质不变的基础上,进行高效的分类搬运。在生产线拆码垛、上下料、集装箱的搬运等方面发挥及其重要的作用。
● 在焊接方面的应用
(工业机器人配英莱激光视觉焊缝跟踪系统的应用)
焊接机器人主要承担焊接工作,不同的工业类型有着不同的工业需求,所以常见的焊接机器人有点焊机器人、弧焊机器人、激光焊机器人等。如今配套英莱激光视觉焊缝跟踪系统,焊接机器人已具备柔性化焊接的能力。
● 在检测方面的应用
(工业机器人配英莱视觉系统应用)
机器人具有多维度的附加功能。它能够代替工作人员在特殊岗位上的工作,比如在高危领域如核污染区域、有毒区域、核污染区域、高危未知区域进行探测。还有人类无法具体到达的地方,如病人患病部位的探测、工业瑕疵的探测等。
● 在装配方面的应用
在工业生产中,零件的装配是一件工程量极大的工作,需要大量的劳动力,曾经的人力装配因为出错率高,效率低而逐渐被工业机器人代替。装配机器人的最大特点,就是安装精度高、灵活性大、耐用程度高。
未来,工业机器人将会承担越来越多的工作,智能化和自动化的趋势,将导致工业机器人改变以往的生产经营模式,通过引进工业机器人实现生产自动化,进一步提升工业生产效率,促进产业结构的智能化调整。




