从工业1.0时代发展到工业4.0时代,科技在飞速进步。在焊接领域,越来越多的工业机器人被应用到各个场景之中,在机器换人的大趋势下,焊接工作也慢慢的由手动变为自动。机器人焊接工作也从开始的“盲焊”发展到如今装配传感器实现智能化焊接,今天,小编和大家一起聊一聊焊接机器人的应用与发展。
焊接机器人的发展历程

工业机器人的出现使人们自然而然首先想到用它代替人的手工焊接,减轻焊工的劳动强度,同时也可以保证焊接质量和提高焊接效率。然而,焊接又与其它工业加工过程不一样,比如,电弧焊过程中,被焊工件由于局部加热熔化和冷却产生变形,焊缝的轨迹会因此而发生变化。手工焊时有经验的焊工可以根据眼睛所观察到的实际焊缝位置适时地调整焊枪的位置、姿态和行走的速度,以适应焊缝轨迹的变化。然而机器人要适应这种变化,必须首先像人一样要“看”到这种变化,然后采取相应的措施调整焊枪的位置和状态,实现对焊缝的实时跟踪。

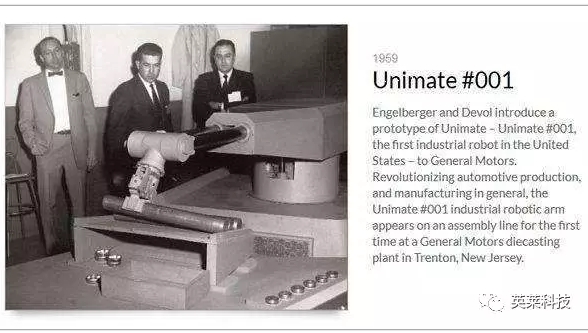
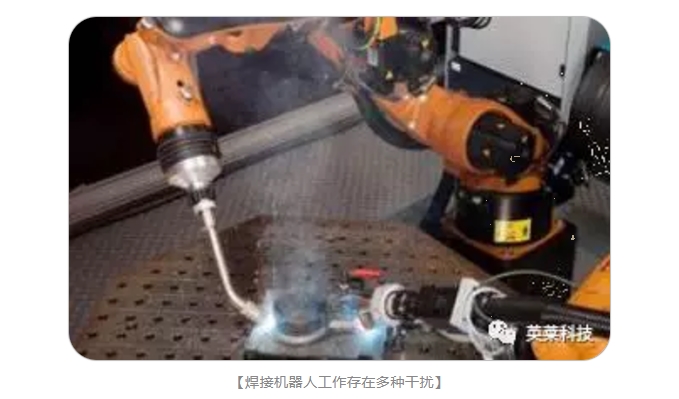
由于电弧焊接过程中有强烈弧光、电弧噪音、烟尘、熔滴过渡不稳定引起的焊丝短路、大电流强磁场等复杂的环境因素的存在,机器人要检测和识别焊缝所需要的信号特征的提取并不像工业制造中其它加工过程的检测那么容易,因此,焊接机器人的应用并不是一开始就用于电弧焊过程的。 实际上,工业机器人在焊接领域的应用最早是从汽车装配生产线上的电阻点焊开始的。原因在于电阻点焊的过程相对比较简单,控制方便,且不需要焊缝轨迹跟踪,对机器人的精度和重复精度的控制要求比较低。
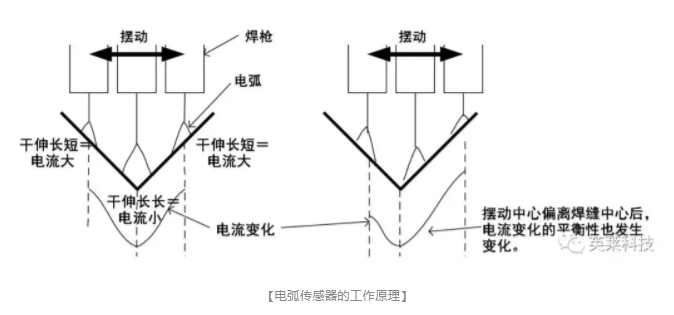
传感器技术的应用
●●● END ●●●
激光视觉产品咨询 | Tel: 0315-5915696
区域销售经理
· 薛经理:19931561215
(上海、江苏、安徽、重庆、四川)
· 霍经理:13933326856
(湖南、浙江、福建、广东、广西)
· 黄经理:19931561197
(山东、河南、湖北)
· 戈经理:13383348988
(北京、河北、山西、陕西、安徽)
· 娄经理:18931990050
(天津、黑龙江、辽宁、吉林、内蒙古)
广东佛山分公司
·刘经理:13928003771
机器人激光跟踪系统方案咨询 | Tel: 0315-5919026
行政办公室及人事招聘 | Tel: 0315-5915695
| Fax: 0315-5068955
| Email:support@intelligentlaser.cn
| Website: www.intelligentlaser.cn
| Add: 唐山市高新技术开发区卫国北路1698号唐山科技中心21层
| Add: 广东省佛山市顺德区乐从镇岭南大道南2号中欧F栋4层425室
以客户为中心 以技术为核心
从工业1.0时代发展到工业4.0时代,科技在飞速进步。在焊接领域,越来越多的工业机器人被应用到各个场景之中,在机器换人的大趋势下,焊接工作也慢慢的由手动变为自动。机器人焊接工作也从开始的“盲焊”发展到如今装配传感器实现智能化焊接,今天,小编和大家一起聊一聊焊接机器人的应用与发展。
焊接机器人的发展历程
工业机器人的出现使人们自然而然首先想到用它代替人的手工焊接,减轻焊工的劳动强度,同时也可以保证焊接质量和提高焊接效率。然而,焊接又与其它工业加工过程不一样,比如,电弧焊过程中,被焊工件由于局部加热熔化和冷却产生变形,焊缝的轨迹会因此而发生变化。手工焊时有经验的焊工可以根据眼睛所观察到的实际焊缝位置适时地调整焊枪的位置、姿态和行走的速度,以适应焊缝轨迹的变化。然而机器人要适应这种变化,必须首先像人一样要“看”到这种变化,然后采取相应的措施调整焊枪的位置和状态,实现对焊缝的实时跟踪。
由于电弧焊接过程中有强烈弧光、电弧噪音、烟尘、熔滴过渡不稳定引起的焊丝短路、大电流强磁场等复杂的环境因素的存在,机器人要检测和识别焊缝所需要的信号特征的提取并不像工业制造中其它加工过程的检测那么容易,因此,焊接机器人的应用并不是一开始就用于电弧焊过程的。 实际上,工业机器人在焊接领域的应用最早是从汽车装配生产线上的电阻点焊开始的。原因在于电阻点焊的过程相对比较简单,控制方便,且不需要焊缝轨迹跟踪,对机器人的精度和重复精度的控制要求比较低。
传感器技术的应用
●●● END ●●●
激光视觉产品咨询 | Tel: 0315-5915696
区域销售经理
· 薛经理:19931561215
(上海、江苏、安徽、重庆、四川)
· 霍经理:13933326856
(湖南、浙江、福建、广东、广西)
· 黄经理:19931561197
(山东、河南、湖北)
· 戈经理:13383348988
(北京、河北、山西、陕西、安徽)
· 娄经理:18931990050
(天津、黑龙江、辽宁、吉林、内蒙古)
广东佛山分公司
·刘经理:13928003771
机器人激光跟踪系统方案咨询 | Tel: 0315-5919026
行政办公室及人事招聘 | Tel: 0315-5915695
| Fax: 0315-5068955
| Email:support@intelligentlaser.cn
| Website: www.intelligentlaser.cn
| Add: 唐山市高新技术开发区卫国北路1698号唐山科技中心21层
| Add: 广东省佛山市顺德区乐从镇岭南大道南2号中欧F栋4层425室




